


Unitate robotică feroviară de profilare și detecție multi-senzorială, bazată pe inteligență artificială și fuziune de date
Marius MINEA, Cătălin Marian DUMITRESCU, Mihai DIMA
Acest articol prezintă cercetările și rezultatele testelor și simulărilor pe teren cu privire la un vehicul feroviar autonom/robotic, conceput pentru a colecta informații multiple privind siguranța și parametrii funcționali ai unui tronson de cale ferată de suprafață și/sau metrou, pe baza fuziunii de date și a învățării automate. Întreținerea căilor ferate complexe, sau a rețelelor de metrou cu perioade lungi de exploatare, este un proces dificil și, de asemenea, consumator de resurse. Soluția propusă oferă operatorilor umani ce lucrează în serviciul și operațiunile de gestionare a defecțiunilor din sarcina consumatoare de timp a inspecției și măsurătorilor feroviare, prin integrarea mai multor senzori și colectarea celor mai relevante informații despre calea ferată, echipamentele de automatizare asociate și infrastructură, totul pe o singură platformă inteligentă. Căruciorul robotizat integrează autonomie, teledetecție, inteligență artificială și capacitatea de a detecta chiar și anomalii de infrastructură. Mai mult, printr-un proces viitor de filtrare statistică și complexă a datelor, se prevede că soluția ar putea fi configurată pentru a oferi informații de ordinul doi despre schimbările de infrastructură, cum ar fi alunecările de teren, inundațiile de apă sau modificări similare. Rezultatele simulărilor și testelor pe teren arată capacitatea platformei de a integra mai multe operațiuni de gestionare a defecțiunilor într-un singur proces, util în creșterea capacității și rezilienței feroviare.
Soluția propusă pentru colectarea mobilă de date autonome pentru aplicațiile feroviare este compusă dintr-un set de senzori montați pe un cărucior cu conducere automată, activat cu tehnici de auto-localizare (inclusiv poziționarea interioară, alimentat de o combinație de odometrie și combinație INS – navigație inerțială, în primă fază). Inițial, prima versiune a fost concepută în principal pentru aplicații de metrou, inclusiv analiza limitelor de ecartamente externe, testarea comunicațiilor la bord/la sol și a balizelor EM, detectarea obstacolelor și/sau a obiectelor străine și descoperirea și avertizarea timpurie a incendiilor. Diagrama bloc a primei versiuni este prezentată în Figura 1.
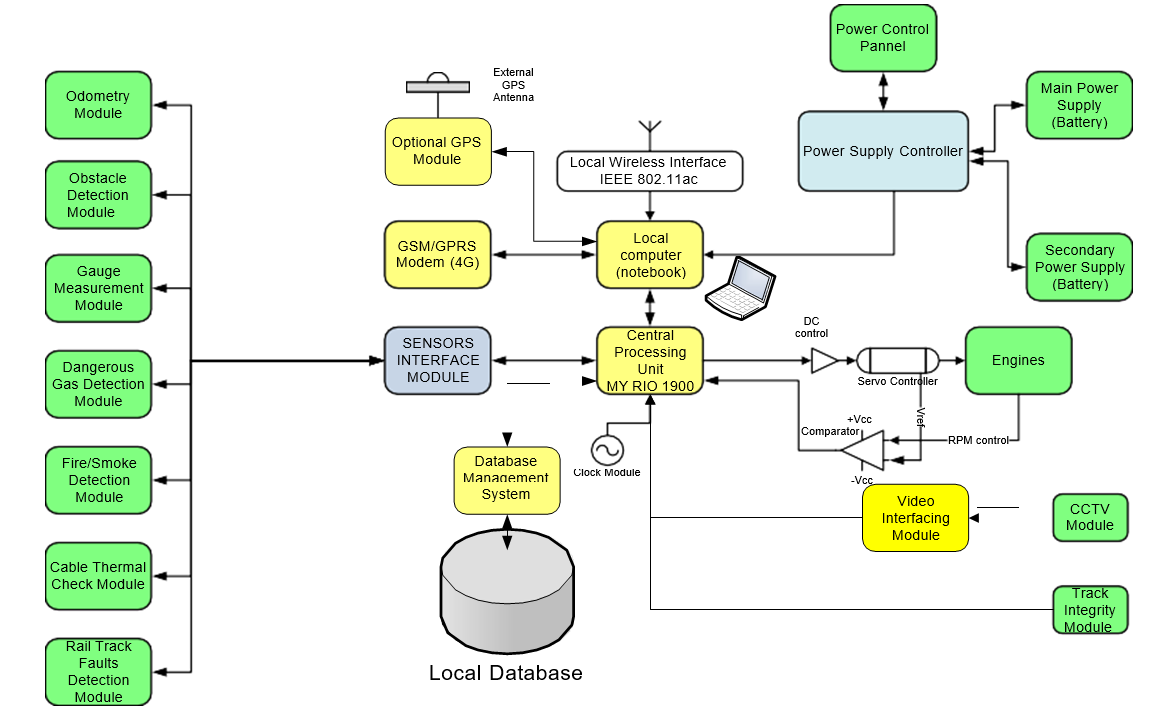
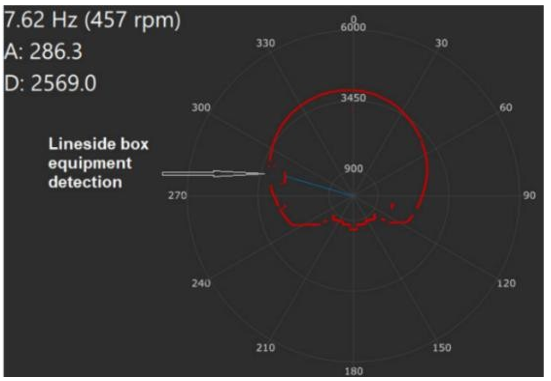
Au fost montate mai multe categorii de senzori la bordul platformei robotice: senzori de deplasare odometrici, senzori cu IR și ultrasunete pentru detecția obstacolelor pe linie și a surselor de căldură (posibile cauze de incendiu), senzori Lidar pentru detecția elementelor de gabarit, senzori pentru detecția atmosferei contaminate. În cadrul testelor efectuate și prezentate în acest articol s-au folosit senzori cu infraroșu, ultrasunete și Lidar pentru detecția șinei a 3-a de alimentare (figura 2) și a gabaritului tunelului de metrou.
A fost realizată o soluție integrată de captare automată a datelor privind condițiile de siguranță pentru infrastructură feroviară sau de metrou, cu ajutorul unei platforme robotizate multi-senzor, capabilă de a utiliza sisteme de culegere multiplă a informațiilor prin tehnologii de fuziune a datelor și inteligență artificială.



