
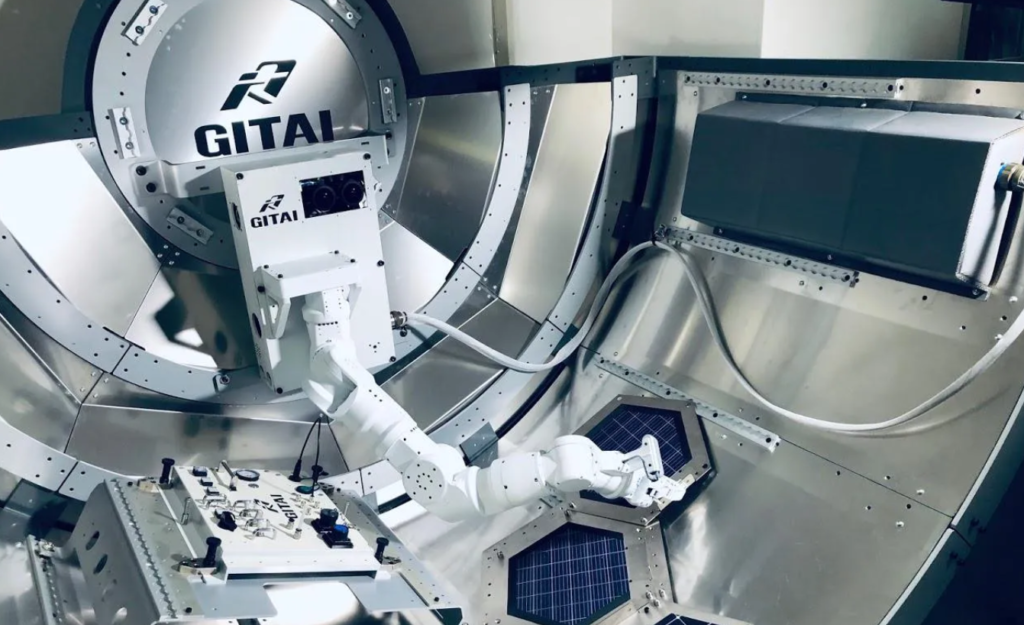
La sfârșitul anului 2020, GITAI, un startup japonez de robotică, a trimis brațul robotic S1 pe Stația Spațială Internațională, ca parte a unui modul comercial de extindere a blocului de aer și pentru a testa un sistem autonom, care ar putea fi util în spațiu. Din cauza faptului că toate intervențiile durează foarte mult pe ISS, astronauții NASA au instalat brațul S1 abia în luna octombrie 2021, GITAI a reușit să pună sistemul în funcțiune, iar brațul a făcut tot ce și-au propus tehnicienii din cadrul companiei.
În această demonstrație tehnologică, robotul spațial autonom GITAI S1 a fost instalat în interiorul ISS Nanoracks Bishop Airlock și a reușit să execute două sarcini: asamblarea structurilor și panourilor pentru asamblarea în spațiu (ISA) și operarea întrerupătoarelor și cablurilor pentru Activitate Intra-Vehiculară ( IVA).
Unul dintre avantajele lucrului în spațiu este acela că vidul este un mediu foarte structurat. Deși microgravitația poate fi oarecum imprevizibilă, astronauții au o idee foarte clară despre caracteristicile obiectelor (și chiar ale luminii) pentru că tot ce se află acolo este excesiv de bine definit. Așadar, folosirea unei prinderi cu două degete pentru sarcini de precizie relativ ridicată este foarte posibilă, deoarece variația cu care trebuie să se confrunte sistemul este redusă. Desigur, lucrurile pot merge întotdeauna prost, așa că GITAI a testat și procedurile teleop impuse pentru a se asigura că sarcinile pot fi îndeplinite și cu asistența oamenilor.
Deoarece crearea unui sistem autonom complet este mult mai dificilă decât implementarea unui sistem parțial autonom, utilizarea ocazională a procedurilor teleop va fi critică pentru roboții spațiali de toate tipurile.