
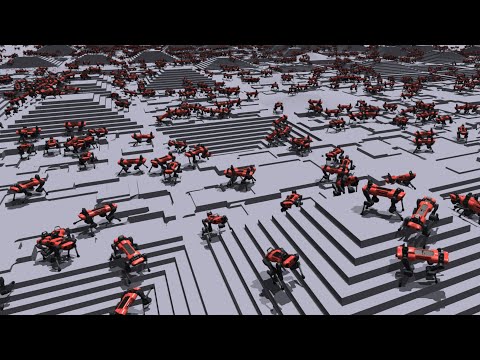
Împreună cu producătorul de cipuri Nvidia, o echipă de cercetători din cadrul ETH Zurich din Elveția a creat o simulare cu o armată de roboți patrupezi pentru a antrena un algoritm care a fost apoi folosit pentru a controla picioarele unui robot real.
În cadrul simulării, roboții, denumiți „ANYmals”, se confruntă cu o serie de obstacole, precum pante, trepte și văi abrupte, într-un peisaj virtual. De fiecare dată când un robot a învățat să navigheze eficient prin mediu, cercetătorii l-au plasat într-unul mai sofisticat pentru a antrena algoritmul.
În timpul antrenamentului, roboții au reușit să învețe destul de ușor să urce și să coboare scările, depășirea obstacolelor mai complexe durând mai mult. Abordarea pantelor s-a dovedit deosebit de dificilă. Totuși, unii dintre roboții virtuali au învățat cum să alunece pe acestea.
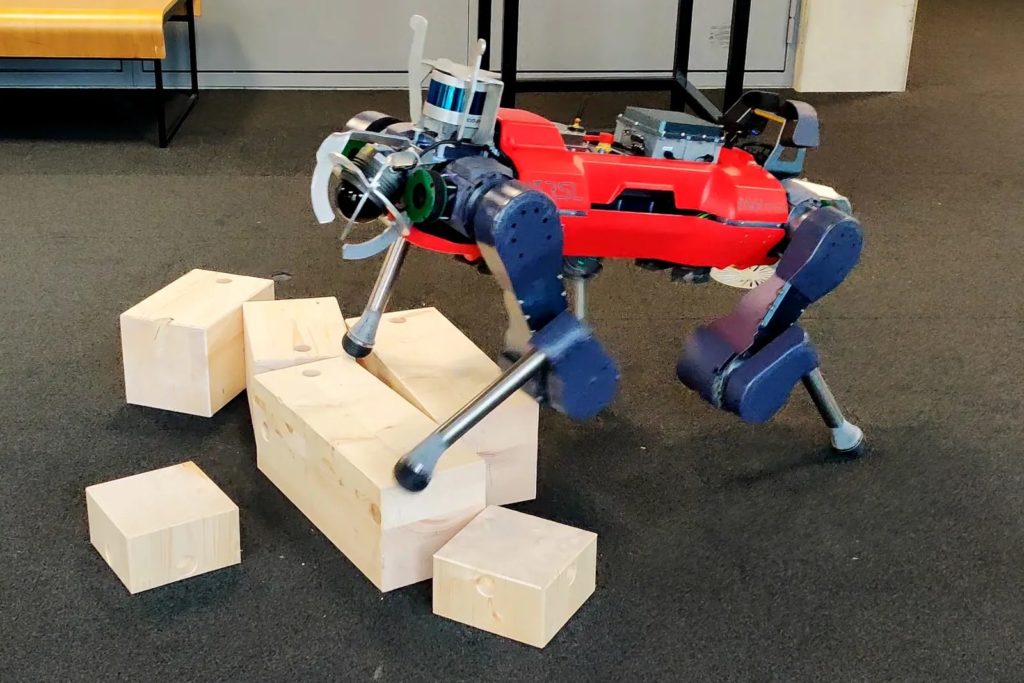
Atunci când algoritmul rezultat a fost transferat la o versiune reală a lui ANYmal, un robot cu patru picioare care are proporțiile unui câine mare și care dispune de un set senzori amplasați pe cap și un braț robotizat detașabil, acesta a putut aborda scări și blocuri. Totuși, acesta a avut dificultăți atunci când a trebuit să parcurgă trasee la viteze mai mari. Cercetătorii au dat vina pe inexactități în modul în care senzorii săi percep lumea reală, în comparație cu simularea.
Tipuri similare de învățare robotică ar putea ajuta mașinile să învețe tot felul de lucruri utile, de la sortarea pachetelor, la coaserea hainelor și recoltarea culturilor. De asemenea, proiectul reflectă importanța simulării și a cipurilor personalizate, în ceea ce privește progresul în domeniul inteligenței artificiale aplicate.
„La un nivel ridicat, simularea foarte rapidă este un lucru cu adevărat extraordinar”, a declarat Pieter Abbeel, profesor în cadrul UC Berkeley și cofondatorul Covariant, o companie care folosește inteligența artificială și simulări pentru a antrena brațele robotice în alegerea și sortarea obiectelor pentru firme de logistică.
Inteligenta artificială a început să fie din ce în ce mai utilizată pentru instruirea roboților, în așa fel încât aceștia să realizeze sarcini din lumea reală care nu pot fi ușor codate în software sau care necesită un tip de adaptare. Capacitatea de a înțelege obiecte cu forme neconvenționale, alunecoase sau necunoscute nu este ceva ce poate fi scris în linii de cod.
Cei 4.000 de roboți simulați au fost instruiți folosind învățarea prin întărire (reinforcement learning), o metodă inspirată de cercetarea modului în care animalele învață prin feedback pozitiv și negativ. Pe măsură ce roboții își mișcă picioarele, un algoritm judecă modul în care acest lucru le afectează capacitatea de a merge și modifică algoritmii de control în consecință.
Simulările au rulat pe cipuri dotate cu IA, produse de compania Nvidia. Drept urmare, cercetătorii au declarat faptul că au reușit să antreneze roboții în mai puțin de o sutime din timpul necesar în mod normal.